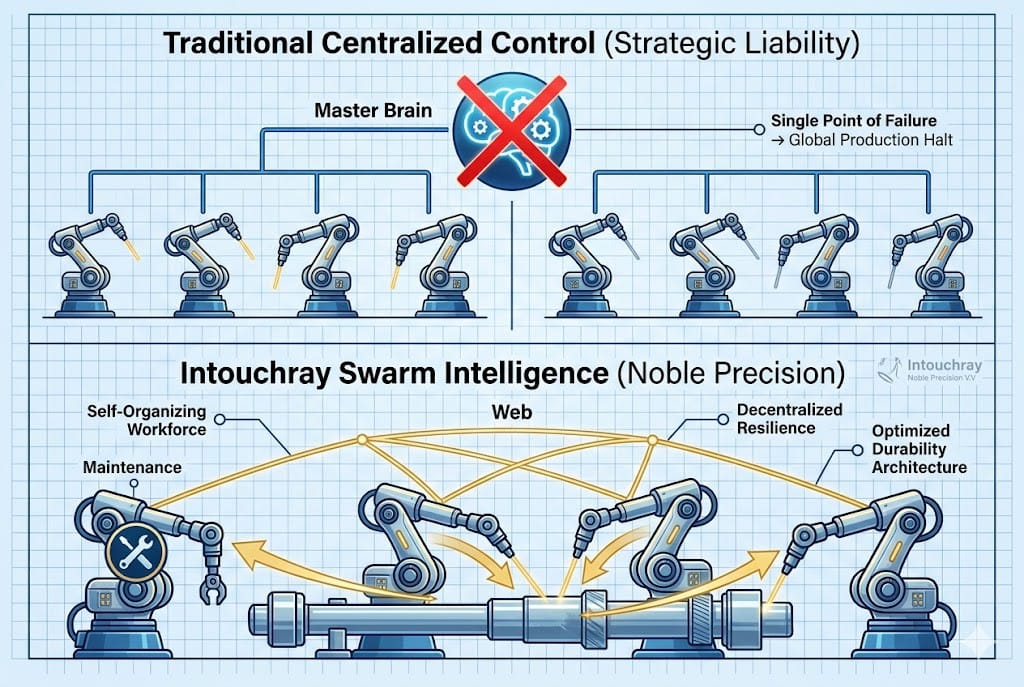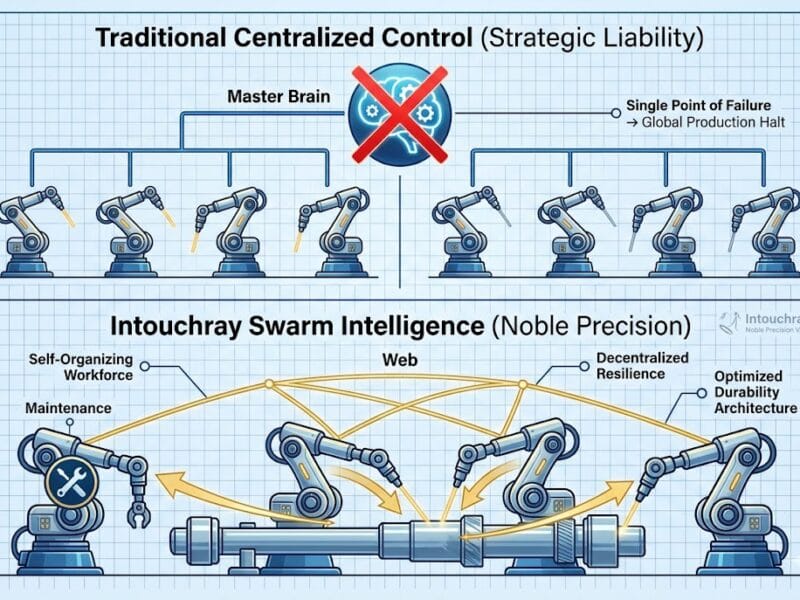
In traditional manufacturing, a “Master Controller” dictates every movement of every robot. While precise, this creates a “Single Point of Failure.” If the controller lags, the entire line halts. This is a strategic liability.
Intouchray Swarm Intelligence (intouchray.com) replaces the master controller with “Local Logic.” By applying principles derived from social insects (bees and ants) to our high-speed EHLA systems (Article #33), we create a production floor that can think, adapt, and repair itself in real-time. We are moving from noble precision (#13) to autonomous collective precision.
- The Decentralized Protocol: “Ant-Colony” Metallurgy
In an Intouchray Swarm, each robotic cladding cell (Article #44) acts as an independent agent. They are connected via the Factory Beam Network (Article #71), but they do not wait for top-down instructions.
Task Pheromones: When a critical component—such as a large-scale turbine shaft (Article #58)—enters the production bay, it broadcasts its “Digital Requirement.” The nearest available EHLA robot “scents” this requirement and claims the task.
Dynamic Load Balancing: If one robot is performing a complex Functional Gradient (Article #64) that is taking longer than expected, the swarm automatically reroutes simpler tasks (like basic surface hardening) to other available units. The floor optimizes itself for maximum Resource Efficiency (#19).
- Collaborative Cladding: The “Multi-Beam” Strike
The most revolutionary aspect of Swarm Intelligence is Collaborative Deposition. For massive industrial assets, a single robot is a bottleneck. In a swarm environment, multiple Intouchray robots can work on a single large workpiece simultaneously.
Inter-Robot Communication: Using ultra-low latency 5G or Li-Fi, the robots synchronize their laser pulses (Article #27) and spatial paths. They “negotiate” the overlap zones of their cladding tracks to ensure a seamless metallurgical bond across the entire surface.
Collision Avoidance: Each arm is aware of the other’s “Kinematic Envelope.” They move in a perfectly choreographed dance, applying high-performance alloys (Article #57) to different sections of the same part without ever interfering with one another.
- Resilience: The Self-Healing Line
In a swarm, there is no “Downtime.” If one robotic unit requires maintenance or a nozzle change, it simply “leaves” the swarm. The remaining units instantly detect the gap in capacity and recalibrate their workflows to compensate.
This provides Strategic Reliability that a traditional linear production line can never achieve. The factory floor becomes a “living” organism that continues to breathe and produce, regardless of individual component failures.
- ROI: Beyond the Assembly Line
Infinite Scalability: Adding capacity is as simple as “dropping” a new Intouchray robot onto the floor. It automatically syncs with the swarm and begins working within minutes.
Zero Rework: Because the swarm uses In-Situ Sensing (Article #65) and shares that data across the network, an error caught by one robot is instantly “learned” by the others, preventing the mistake from ever being repeated.
Conclusion: The Intelligent Collective
Article #72 marks the transition from “Robots as Tools” to “Robots as a Workforce.” The swarm is the future of high-volume, high-complexity industrial restoration. In Article #73, we look at the human element in this new world: The Augmented Technician: Human-Machine Symbiosis in the Laser Bay.
Image Attachment